 Fraunhofer-Allianz autoMOBILproduktion
Fraunhofer-Allianz autoMOBILproduktionMehrachs-Kinematik für hochgenaue Bahnprozesse
Das Hauptziel des Projektes ist die Entwicklung einer seriellen Mehrachs-Kinematik auf einer Linearachse („Flexmatik“) für hochgenaue Bahnprozesse. Hierbei wird am Beispiel des Zerspanungsprozesses das Erreichen einer Fertigungstoleranz von mindestens ± 0,1 mm bei der Bearbeitung von Leichtbauwerkstoffen wie Aluminium und CFK bereits ab Bauteil 1 angestrebt. Das System ist so ausgelegt, dass keine Sonderfundamente notwendig sind und somit eine kostengünstige und flexible Aufstellung erfolgen kann.
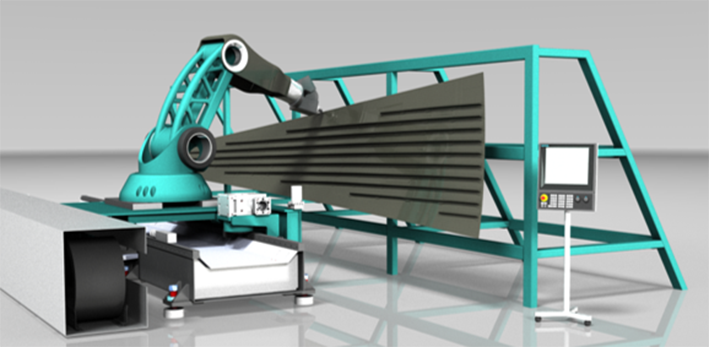
Die Vorteile von seriellen Knickarmrobotern ist eine geringe Aufstellfläche bei einem gleichzeitig deutlich größeren Arbeitsraum. Zudem sind Knickarmroboter deutlich flexibler in Bezug auf die Zugänglichkeit zu Werkstücken. Der große Nachteil an aktuellen Industrierobotern ist die Nachgiebigkeit und die nicht für Bahnprozesse entwickelten Steuerungen.
Mit der Flexmatik-Mehrachskinematik wurden diese Probleme grundlegend angegangen und eine Kinematik entwickelt, die absolut genau verfährt, auch unter Einwirkung externer Kräfte.
